
With the development of a diversity-orientated design and safety concept for human-robot collaborations, SAFEIVERSE aims to create inclusion in robotics. Carinthia is to play a pioneering role in demonstrating how working conditions and opportunities for people with disabilities can be improved and expanded in order to increase social and economic sustainability.
What is the background?
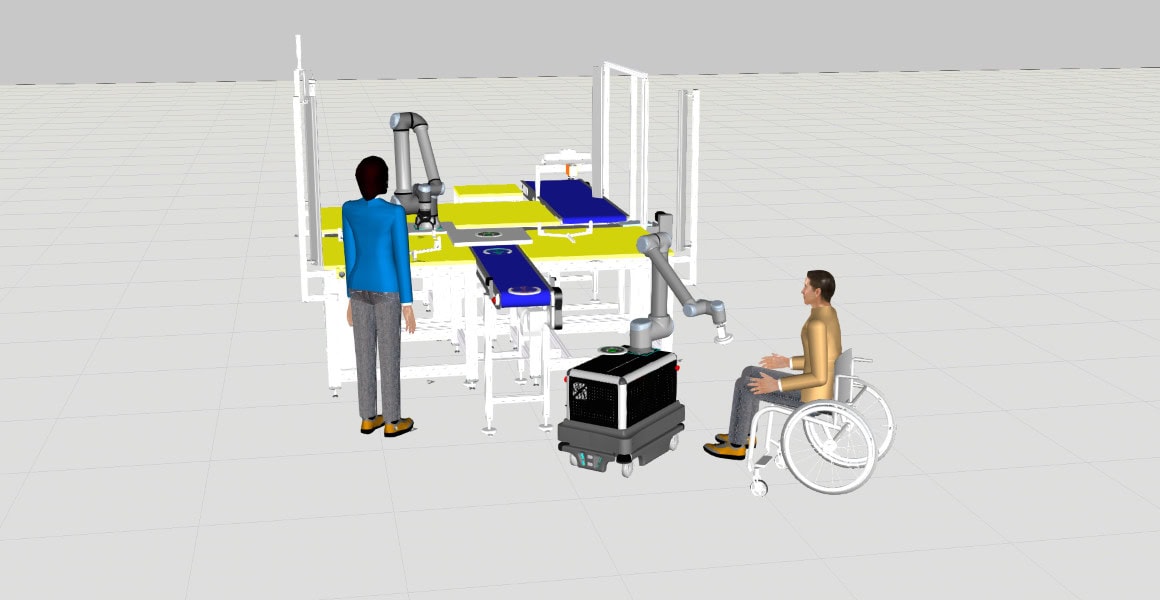
Industrial production is increasingly moving away from pure automation systems towards flexible, human-centred, sustainable solutions. Human-robot collaborations (HRC) and interactions in particular enable direct collaboration without a safety fence, allowing humans to be optimally supported by a robot, creating versatile and adaptive working conditions. In industry, the advantages and potential of human-centred, flexible HRC applications are already known and some have already been implemented or are in the implementation phase. However, this poses new challenges in terms of ensuring personal safety. The problem, however, is that current design principles and requirements for the safety of the application are based on healthy or unrestricted persons and do not take diversity characteristics into account, primarily because the empirical values of workplace design and evaluation have historically come from male-dominated production. For example, pain thresholds for body regions affected by possible contact between humans and robots, which are specified in applicable standards, do not differentiate between (anatomical) genders, and mental and physical limitations are not taken into account. However, due to the possibilities described above, HRC applications offer great potential for supporting people with disabilities. By using the robot in a targeted manner, activities can be performed that would not be possible without assistance.
We would like to express our sincere thanks to Sepin Orthopädietechnik Sanitätshaus GmbH and to Lebenshilfe Kärnten for their valuable support, as well as to autArK for their trustful cooperation.
![]()

![]()