In war situations, as is currently the case in Ukraine, the disruption of supplies is a key element. In general, supply convoys are exposed to an increased threat from IEDs (Improvised Explosive Devices). Automated military convoys with passive navigation offer the possibility of transporting supplies undetected through dangerous (enemy) areas while ensuring the protection of soldiers. In addition, supply depots are high-value targets. Small, distributed warehouses therefore offer better security of supply in war scenarios, but at the same time also an increasing logistical complexity that can hardly be managed without automation. Logistical operations already play a central role today, for example in Lebanon with the ‘Multi Role Logistic Unit’ transport unit.
Goal
For this reason, UMPAS has set itself the goal of researching an autonomously driving lorry that uses only passive sensors and can react to critical terrain situations. This lorry should be able to automatically follow a pre-trained, moderate terrain route at a moderate speed (<= 20 km/h) on a laboratory scale in daylight and without precipitation using passive sensors and without infrastructure such as GNSS.
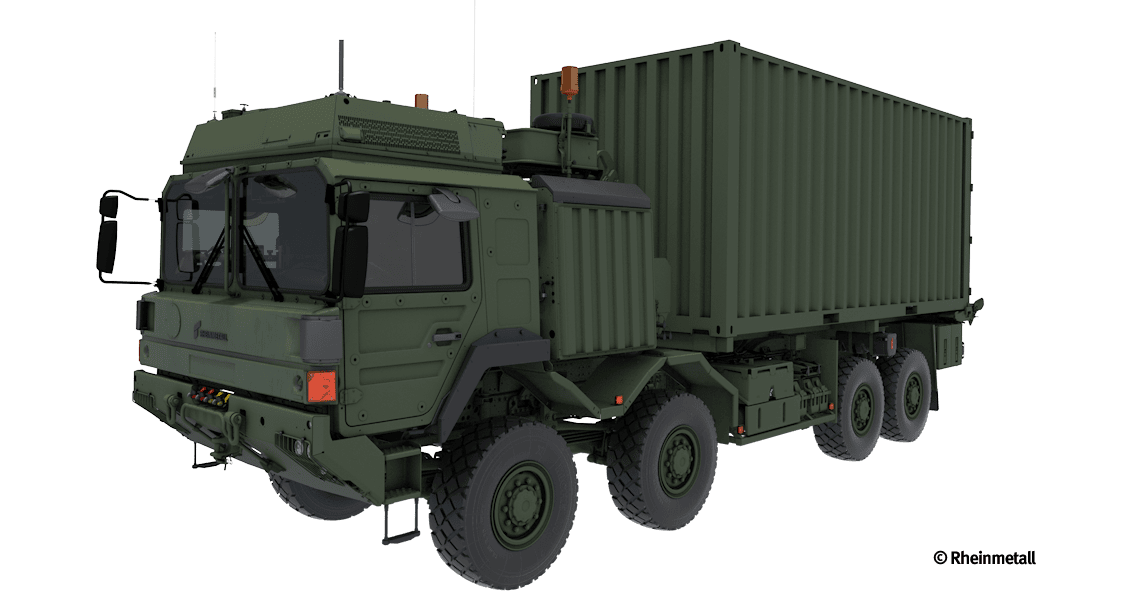
To achieve this goal, a drive-by-wire (DBW)-capable RMMV HX2 logistics lorry is to be converted into an automated test vehicle. To this end, the vehicle will be equipped with an A-Kit, which is being developed in the project. This enables passive obstacle detection, localisation, path planning and navigation. It comprises cameras, an IMU and a control computer and forwards vehicle-independent driving commands. The algorithms of the A-Kit have already been simulated in the Simpas preliminary project and must now be transferred to the real vehicle and adapted. The B-Kit in the lorry accepts the driving commands and controls the engine and steering angle. RMMV has an initial version for this purpose. For off-road scenarios, additional controllers must be developed in the B-Kit in order to estimate the coefficient of friction between the tyres and the ground on the basis of vehicle measurement data such as slip and acceleration, thus ensuring driving safety.
Test setup with passive sensors
At the end of the project, a test setup of a military logistics lorry will be available that can carry out automated supply runs under laboratory conditions using only passive sensor technology. This novel, previously unknown technology offers a high degree of innovation, as it enables unnoticed supply and thus protects human lives. In addition, the UMPAS project strengthens Austria as a business location through technological leadership and the competitiveness of RMMV as a complete system supplier. As soon as the military automated all-terrain vehicles are ready for use, they could revolutionise the industry, protect Austrian soldiers' lives and improve logistics in war zones. The project results will help the BMLV to better understand the technology and conduct future tenders more efficiently.
The project has been funded by the Austrian defense research programme FORTE of the Federal Ministry of Finance (BMF).